اورنیتوپتر (Ornithopter) چیست؟
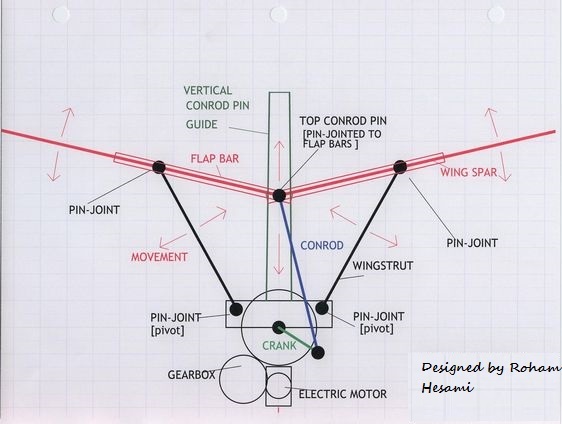
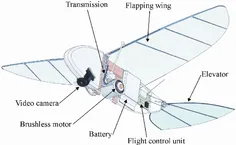
اورنیتوپتر (از ornithos یونانی "پرنده" و پرتون "بال") هواپیمایی است که با زدن بال خود پرواز می کند. طراحان به دنبال تقلید از بال زدن پرواز پرندگان ، خفاش ها و حشرات هستند. اگرچه ممکن است ماشین آلات از نظر فرم متفاوت باشند ، اما معمولاً در مقیاس مشابه این موجودات پرنده ساخته می شونداورنیتوپتر دستگاهی است که برای بدست آوردن پرواز از طریق زدن بال طراحی شده است. Ornithopters اساساً برای تقلید از پرواز پرندگان طراحی شده است. در اکثر موارد ، پرنده های کوچک در همان مقیاس با نمونه زنده خود ساخته می شوند.Ornithopter یا "بال فلپینگ" از مکانیک پرواز پرندگان به عنوان منبع تغذیه پهپاد استفاده می کند. این فناوری توسط ارتش برای تولید یک پهپاد کوچک "پرنده مانند" با قابلیت نظارت استفاده شده است. با این حال ، این فناوری چند نکته منفی دارد. یکی از سقوط ها ، کمبود زمان پرواز به دلیل نیاز بیش از حد به برق مورد نیاز برای مکانیسم فلپ است. سقوط دیگر عدم قدرت مانور است. با این حال ، با پیشرفت این فناوری ، ممکن است پهپاد اورنیتوپتر در بین مردم محبوبیت بیشتری پیدا کند.اکثریت قریب به اتفاق هواپیماهای بدون سرنشین سیستم های بال گردان هستند (مانند کوادروتورها) و به همین دلیل: آنها ارزان هستند ، آسان هستند ، بالا و پایین می روند و ما در کنترل آنها حتی در محیط های بسیار چالش برانگیز با این وجود ، در بیشتر برنامه ها ، هواپیماهای بدون سرنشین تقریباً از هر جهت به پرندگان و بال هایشان ضربه می خورند - بال زدن بسیار کارآمد است ، چابکی حیرت انگیز را امکان پذیر می کند و بسیار ایمن تر است ، قادر به ایجاد تماس سازگار با سطوح است نه اینکه آنها را مانند یک سیستم روتور خرد کند میکند. اما بال فلپینگ چالش های خود را نیز دارد: ساخت ربات هایی که بال بال می زنند بسیار دشوارتر از این است که فقط موتورهای چرخشی داکت را روی قاب بچسبانیم که به استثنای چند مورد ، تقریباً به اندازه پیشرفت در هواپیماهای بدون سرنشین معمولی شاهد پیشرفت نیستیم. .یکی از دلایل دشوار ساختن یک ربات بال دار این است که بالها باید با سرعت بالا به جلو و عقب بروند در حالی که موتورهای الکتریکی با سرعت زیاد به دور و اطراف می چرخند. این امر به یک سیستم انتقال نسبتاً پیچیده نیاز دارد ، که (اگر این کار را با دقت انجام ندهید) منجر به مجازات های سنگین و کاهش قابل توجه کارایی می شود. یک چالش خاص این است که جرم رفت و برگشت بالها باعث انعطاف پذیری کل ربات به عقب و جلو می شود ، که به طور متناوب عناصر موجود در سیستم انتقال را متصل و از هم جدا می کند
۳.۶k
۱۶ تیر ۱۴۰۰










دیدگاه ها (۲)
هنوز هیچ دیدگاهی برای این مطلب ثبت نشده است.