چرخش جاذبه ای برای شاتل فضایی توسط موشک
من سعی می کنم چرخش جاذبه را با استفاده از یک دستگاه محرک گیمبال شبیه سازی کنم. من با استفاده از سیستم دینامیکی توصیف شده ، یک چرخش جاذبه را با تغییر زاویه ϕT بین بردار رانش و بردار سرعت تا حدودی درجه به محض رسیدن موشک به ارتفاع معین و چرخش زاویه گیمبال ، اجرا می کنم. ثابت تا فرسودگی. بعد از آزمایش با چند طرح موشک ، متوجه شدم که برای تحقق آن به زوایای بسیار بزرگی احتیاج داشتم (تقریباً 45 درجه) و فکر نمی کنم این در واقعیت واقعاً عملی باشد.
بنابراین ، من کنجکاوم که چگونه برنامه pitch-over در واقع چگونه اجرا می شود. به عنوان مثال ، شاتل های فضایی را بردارید. برای اجرای چرخش گرانش به چه زاویه گیمبال نیاز بود؟ آیا ثابت بود یا با گذشت زمان زاویه تغییر کرد (مثل حلقه کنترل اتوماتیک)؟ برای مدت زمانی که گیمبال ها زاویه دار بودند تا نوبت تولید شود؟
آیا پایگاه داده ای وجود دارد که کنترل های گیمبال را به مرور زمان برای فضاپیماهای مختلف انجام دهد تا چرخش جاذبه را انجام دهند؟با غلتک زدن دور موتورها از خط تلاقی مرکز جرم ، گشتاور تولید می شود که نرخ چرخش دارد. اگر وسیله نقلیه پایدار باشد ، در نهایت یک انحراف بسیار کوچک باید شما را به زاویه گام مورد نظر برساند.
منطق اساسی یک حلقه کنترل خودکار است که از چیزی مانند کنترل کننده PID استفاده می کند ، معمولاً با چندین محدودیت اضافی - مانند اینکه از یک زاویه خاص از حد حمله فراتر نرود. زاویه واقعی گیمبال در طول پرواز دائماً در حال تغییر است ، زیرا باید تمام اتفاقات دنیای واقعی را که برای وسیله نقلیه اتفاق می افتد مانند طوفان باد ، رانش ناهموار ، برافروختگی پیشرانه و غیره جبران کند.
از ویژگی های خوب یک کنترل کننده PID که به خوبی تنظیم شده است این است که در صورت دورتر شدن از هدف (قسمت P برای متناسب) یک سیگنال کنترل بزرگتر (یعنی زاویه بزرگتر از گیمبال) تولید می کند ، اگر کنترل متناسب نگه داشته نشود ، تلاش آن را افزایش می دهد به یک دلیل یا دلیل دیگر (بخش من برای انتگرال) ، و از جبران بیش از حد و نوسانات ناخواسته در اطراف هدف (بخش D برای مشتق) جلوگیری می کند.
من معتقدم حلقه بروزرسانی شاتل هر 40 میلی ثانیه اجرا می شود.
سیستم هدایت Saturn V میزان تنظیم متناسب و مشتق کنترلر خود را در زمان های برنامه ریزی شده در طول پرواز تنظیم می کند تا خودرو سبک تر و در هوای کمتر متراکم تنظیم شود. (من نمی دانم که آیا این بدان معنی است که کنترل آن PD بوده است نه PID). در اینجا برخی از اصول راهنمای صعود شاتل آورده شده است ، بنابراین می توانید پاسخ من را تفسیر کنید.
در مرحله اول ، شاتل یک پروفایل پیچ-خمیازه-رول از پیش طراحی شده (بنابراین حلقه باز) را انجام داد ، از جمله چیزهای دیگر ، بر اساس بادهای اندازه گیری شده روز است. (توجه داشته باشید که فقط اهداف نگرشی حلقه باز بودند. شاتل از سیستم کنترل حلقه بسته برای پرواز به آن اهداف استفاده می کرد.)
پس از جداسازی تقویت کننده موشک جامد ، از یک طرح هدایت حلقه بسته به نام Powered Explicit Guidance استفاده شد که وسیله نقلیه را به سمت اهداف اصلی قطع موتور (MECO) هدایت می کرد. در طی این مرحله ، نگرش فرمایشی به طور مداوم محاسبه می شد.
بنابراین ، با توجه به اینکه ، حتی اگر شاتل یک حرکت ثابت داشته باشد ، موتورها به طور مداوم در حال غرق شدن هستند تا بردار رانش را با استفاده از پیشرانه از مرکز جرم نشان دهند.
همچنین توجه داشته باشید که در طول مرحله اول ، به دلیل فشار زیاد SRB و بازوهای لحظه ای طولانی از نازل ها به طرف کنترل ، کنترل حالت در درجه اول از طریق کنترل بردار رانش SRB کنترل می شد.
من برخی از یادداشت ها را نشان می دهم که نشان می دهد گیمبال مرکز SSME در هنگام بلند شدن در حدود 4.25 درجه شروع می شود ، در سپر SRB به آرامی تا 5 درجه بالا می رود ، سپس در سپتامبر به سرعت به کمی بیش از 1 درجه می رسد. در مرحله دوم ، گیمبال به آرامی به سمت بالا حرکت کرد و دوباره در MECO حدود 4.25 درجه پیچید.
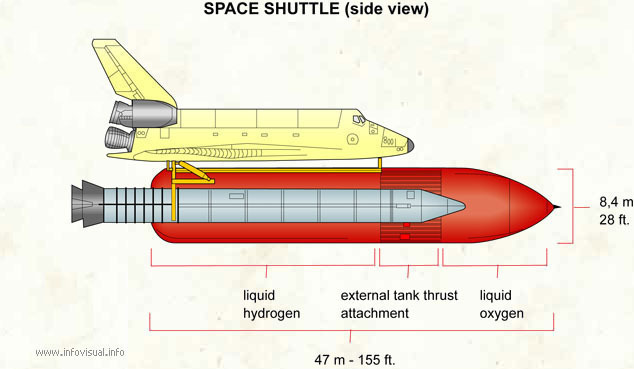
لطفا توجه داشته باشید که این زوایای گیمبال از موقعیت نصب نول اندازه گیری می شوند. همانطور که در این نمای جانبی مشاهده می کنید ، در موقعیت نصب شده موتور یک زاویه گام وجود دارد ، به طوری که موقعیت نصب نول تقریباً از حد متوسط متغیر است.
بنابراین ، من کنجکاوم که چگونه برنامه pitch-over در واقع چگونه اجرا می شود. به عنوان مثال ، شاتل های فضایی را بردارید. برای اجرای چرخش گرانش به چه زاویه گیمبال نیاز بود؟ آیا ثابت بود یا با گذشت زمان زاویه تغییر کرد (مثل حلقه کنترل اتوماتیک)؟ برای مدت زمانی که گیمبال ها زاویه دار بودند تا نوبت تولید شود؟
آیا پایگاه داده ای وجود دارد که کنترل های گیمبال را به مرور زمان برای فضاپیماهای مختلف انجام دهد تا چرخش جاذبه را انجام دهند؟با غلتک زدن دور موتورها از خط تلاقی مرکز جرم ، گشتاور تولید می شود که نرخ چرخش دارد. اگر وسیله نقلیه پایدار باشد ، در نهایت یک انحراف بسیار کوچک باید شما را به زاویه گام مورد نظر برساند.
منطق اساسی یک حلقه کنترل خودکار است که از چیزی مانند کنترل کننده PID استفاده می کند ، معمولاً با چندین محدودیت اضافی - مانند اینکه از یک زاویه خاص از حد حمله فراتر نرود. زاویه واقعی گیمبال در طول پرواز دائماً در حال تغییر است ، زیرا باید تمام اتفاقات دنیای واقعی را که برای وسیله نقلیه اتفاق می افتد مانند طوفان باد ، رانش ناهموار ، برافروختگی پیشرانه و غیره جبران کند.
از ویژگی های خوب یک کنترل کننده PID که به خوبی تنظیم شده است این است که در صورت دورتر شدن از هدف (قسمت P برای متناسب) یک سیگنال کنترل بزرگتر (یعنی زاویه بزرگتر از گیمبال) تولید می کند ، اگر کنترل متناسب نگه داشته نشود ، تلاش آن را افزایش می دهد به یک دلیل یا دلیل دیگر (بخش من برای انتگرال) ، و از جبران بیش از حد و نوسانات ناخواسته در اطراف هدف (بخش D برای مشتق) جلوگیری می کند.
من معتقدم حلقه بروزرسانی شاتل هر 40 میلی ثانیه اجرا می شود.
سیستم هدایت Saturn V میزان تنظیم متناسب و مشتق کنترلر خود را در زمان های برنامه ریزی شده در طول پرواز تنظیم می کند تا خودرو سبک تر و در هوای کمتر متراکم تنظیم شود. (من نمی دانم که آیا این بدان معنی است که کنترل آن PD بوده است نه PID). در اینجا برخی از اصول راهنمای صعود شاتل آورده شده است ، بنابراین می توانید پاسخ من را تفسیر کنید.
در مرحله اول ، شاتل یک پروفایل پیچ-خمیازه-رول از پیش طراحی شده (بنابراین حلقه باز) را انجام داد ، از جمله چیزهای دیگر ، بر اساس بادهای اندازه گیری شده روز است. (توجه داشته باشید که فقط اهداف نگرشی حلقه باز بودند. شاتل از سیستم کنترل حلقه بسته برای پرواز به آن اهداف استفاده می کرد.)
پس از جداسازی تقویت کننده موشک جامد ، از یک طرح هدایت حلقه بسته به نام Powered Explicit Guidance استفاده شد که وسیله نقلیه را به سمت اهداف اصلی قطع موتور (MECO) هدایت می کرد. در طی این مرحله ، نگرش فرمایشی به طور مداوم محاسبه می شد.
بنابراین ، با توجه به اینکه ، حتی اگر شاتل یک حرکت ثابت داشته باشد ، موتورها به طور مداوم در حال غرق شدن هستند تا بردار رانش را با استفاده از پیشرانه از مرکز جرم نشان دهند.
همچنین توجه داشته باشید که در طول مرحله اول ، به دلیل فشار زیاد SRB و بازوهای لحظه ای طولانی از نازل ها به طرف کنترل ، کنترل حالت در درجه اول از طریق کنترل بردار رانش SRB کنترل می شد.
من برخی از یادداشت ها را نشان می دهم که نشان می دهد گیمبال مرکز SSME در هنگام بلند شدن در حدود 4.25 درجه شروع می شود ، در سپر SRB به آرامی تا 5 درجه بالا می رود ، سپس در سپتامبر به سرعت به کمی بیش از 1 درجه می رسد. در مرحله دوم ، گیمبال به آرامی به سمت بالا حرکت کرد و دوباره در MECO حدود 4.25 درجه پیچید.
لطفا توجه داشته باشید که این زوایای گیمبال از موقعیت نصب نول اندازه گیری می شوند. همانطور که در این نمای جانبی مشاهده می کنید ، در موقعیت نصب شده موتور یک زاویه گام وجود دارد ، به طوری که موقعیت نصب نول تقریباً از حد متوسط متغیر است.
۱.۵k
۰۲ تیر ۱۴۰۰



دیدگاه ها (۱)
هنوز هیچ دیدگاهی برای این مطلب ثبت نشده است.